QUESTIONS DE RECHERCHE
Un robot de compagnie au quotidien
Perception, relation, cohabition et scénario d’usage
Table des matières
Texte intégral
1L’accessibilité des robots au niveau du grand public, avec la commercialisation d’Aibo™, le robot chien de Sony en France dès 1999, remet en question la perception des robots ayant une dimension plus familière. Cette nouvelle donne interroge les dimensions anthropologiques d’acceptation culturelle des robots par le grand public (considéré comme une cible potentielle d’usagers). Dans le champ des robots sociaux, c’est-à-dire des robots capables d’avoir des interactions sociales avec des humains, des animaux ou d’autres robots, il existe des robots dits « de compagnie » destinés à tenir compagnie comme le robot phoque Paro (1990, Takanori Shibata) pour les personnes âgées ou à assister les personnes en difficultés, les enfants ou les personnes âgées. Comment pourraient-ils s’intégrer dans notre quotidien dans les foyers occidentaux ? Quel scénario de vie se trame avec eux ?
2Le rapport des SHS aux technologies, et notamment à la robotique, amène à repenser la conception des robots à partir du design et de la connaissance approfondie des usages sociaux de ces appareils techniques complexes, en tenant compte des imaginaires qui traversent et modèlent les formes et les fonctions socialement acceptables. En ce sens, les notions de contexte culturel et d’usage (les temporalités et les spatialités du contemporain), d’environnement, d’interaction sociale, sont à redéfinir en prenant en considération du caractère innovant que représentent la présence et l’action des robots dans la vie quotidienne.
3Issus d’une technologie de pointe, ils émergent dans une dimension complexe imprégnée d’un univers de fiction stéréotypé à la fois symbolique d’un progrès bénéfique et objet de crainte aux E-U ou en Europe par exemple. De nombreux exemples au succès international permettent d’illustrer ce propos : les robots esclaves présentés dans la pièce de Karel Capek (1921), le Terminator perfide de James Cameron (1985), le R2D2 multifonctionnel de Star Wars (Lucas, 1977). La représentation de ces œuvres fictionnelles est importante du fait que plusieurs millions d’Américains, d’Européens, d’Asiatiques sont conscients de ces images (Cardoso, 2013). Or, des robots apparaissent désormais dans les EHPAD (Nao, Aldebaran), les musées (Berenson au Quai Branly), ou encore auprès des enfants autistes (Nao, Aldebaran). Dès lors, comment partager notre quotidien avec eux ? Témoins de notre modernité, questionner le rôle des robots sociaux et les interactions au sein de nos sociétés contemporaines interroge la discipline du design : le designer est amené à concevoir et à donner du sens à de nouveaux usages entre espace, produit, interaction, information, image, expérience et service. Sa démarche consiste à définir et à concevoir la façon dont les personnes, les produits et les services dialoguent dans un contexte précis. Dès lors, il s’agit de s’attacher aux nouvelles figures de représentation possibles de ces machines dotées d’intelligence artificielle mais également de concevoir des scénarios d’usage, des activités et expériences en fonction des contextes spatiotemporels. Ainsi les robots ne se situeraient pas uniquement dans la quotidienneté mais plutôt dans diverses narrations qui les mettent en scène, des espaces qui contribuent à créer la mise en relation avec l’usager. Dans la perspective de concevoir de nouveaux usages et de nouvelles interactions, les enjeux d’acceptabilité et les formes de présence à autrui sont au cœur du problème. En cela, la démarche design prend en considération l’anthropologie, les travaux de Lucy Suchman démontrent que l’action humaine est constamment construite et reconstruite en fonction d’interactions dynamiques avec les mondes matériel et social. L’anthropologue met en lumière l’importance de l’environnement comme étant partie intégrale du processus cognitif (situated cognition).
4Nous interrogerons alors les robots en tant qu’objet anthropologique, objet aux scénarii d’usage à créer. Nous proposons les résultats de deux enquêtes de perception, l’une basée sur l’évaluation de huit concepts de robots compagnons à partir de leur iconographie, l’autre relève d’une expérimentation entre le robot Aibo et le grand public (Cardoso, 2009 ; 2013). Nous nous appuierons dans un second temps sur la conception de robots pour personnes âgées et l’expérimentation d’interaction du robot Nao en EHPAD. Enfin, nous mettrons en lumière les éléments de travail nécessaires dans la démarche de conceptualisation en design quant aux mises en perspectives sociétales potentielles des robots.
Représentation. Perception. Interaction
5Les robots offrent une approche multidimensionnelle selon les contextes d’émergence : créatures anthropomorphes ou animales, représentations fantasmatiques du Golem, esclaves ménagers, substituts perfides. À propos des robots, l’histoire des techniques domine du canard mécanique de Vaucanson à Norbert Wiener, père fondateur de la cybernétique. Toutefois, le numéro de la revue Gradhiva (2012) démontre que la robotique est devenue un objet anthropologique.
6Mori (1970) a mis en place un schéma de représentation dans la perception des robots qui met en lumière un sentiment d’étrangeté. Il est provoqué par la mise en présence d’un robot anthropomorphe, un élément de bascule d’une représentation humanoïde à l’autre. La vallée de l’étrange oscille entre les degrés d’empathie et de répulsion « entre le robot humanoïde, le cadavre, le zombie, les marionnettes bunraku, l’ersatz humain en bonne santé » (Vidal, 2012). L’anthropologue Denis Vidal avance l’idée d’un « pacte anthropomorphique » réussie avec les marionnettes du théâtre Bunraku dont les roboticiens s’inspirent fréquemment. « De même qu’il est utile de dissocier un anthropomorphisme envisagé comme piège d’un autre relevant du pacte, il faudra également distinguer un anthropomorphisme représentationnel, risquant toujours d’être assimilé sur le plan épistémologique à une sorte de carcan cognitif, d’un anthropomorphisme interactif, considéré comme un instrument relationnel d’évaluation et d’ajustement aux objets qui nous entourent. Cette seconde conception paraît à la fois la plus soutenable et la plus heuristique, dès lors qu’on s’intéresse à l’interaction, mais elle ne va pas sans poser à l’anthropologie toute une série de questions. » (Grimaud, Vidal, 2012). Il semble pertinent de relever que les formes de présence et les relations homme/robot à envisager peuvent paraître évolutives dès lors que nous sommes dans l’acception d’une figure « interactive ».
7Les robots compagnons actuellement produits et commercialisés sont capables de divertir, de jouer, d’échanger quelques mots et d’interagir avec leur propriétaire. Leurs fonctions sont multiples : lecture et alerte email, accueil dans les halls et exposition, surveillance des foyers (webcam), divertissement (danse) et jeux ludo-éducatifs (apprentissage, éveil et aide devoirs pour les enfants).
8Il est possible d’attribuer un caractère, un comportement au robot chien Aibo, il peut être capricieux, exécuter ou non les ordres, et s’enrichir de données pour emmagasiner ainsi les préférences de son utilisateur. Selon la fréquence et le type d’utilisation, le robot développera un caractère plus joueur, tandis qu’un autre avec un usager différent sera studieux ou serviable. Les choix morphologiques et caractériels, représentation formelle humanoïde ou zoomorphe, causent une grande confusion dans les affordances, il devient un objet où la technologie est colorée par une vision progressiste et magique.
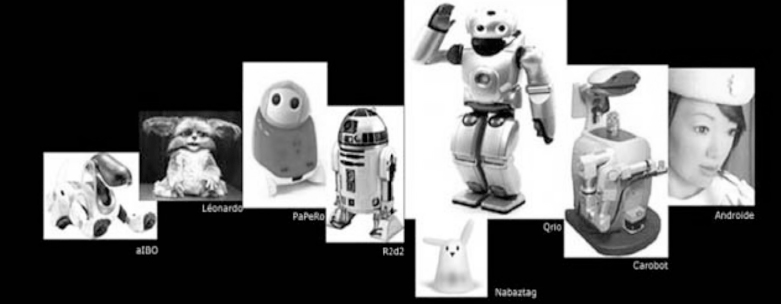
9Dans le souci de mesurer l’acceptation culturelle, il s’est avéré pertinent d’évaluer la perception des robots de compagnie en Occident à partir de leur iconographie. D’après une première enquête de perception menée en ligne auprès d’un public francophone et néophyte en robotique, huit concepts de robots de compagnie du zoomorphe à l’anthropomorphe (Fig. 1) ont été évalués : Aibo et Qrio (Sony, 2003), Leonardo (MIT, 2004), PaPeRo (Nec, 2001), Nabaztag (Violet, 2005), Carobot, (Alsok, Japan, 2004), Actroid (Osaka University, 2005), R2D2 (Star War, 1974). L’objectif consiste à cerner le registre de référence sémantique perçu par le public et à évaluer les fonctionnalités des concepts à partir de leur représentation. Dans le cadre de cet article, nous ferons uniquement usage de la synthèse des résultats obtenus. Ces derniers ont révélé une association quasi systématique des robots de compagnie aux tâches ménagères. Les répondants sont manifestement nourris par le fantasme des années 1950 qui visait à libérer les ménagères par l’arrivée d’une technologie progressiste. Ils expriment également l’influence de la science-fiction quant à l’importance de la figure de R2D2 qui demeure le concept le plus utile, le plus social et le plus affectueux. C’est le robot que le public, considéré comme potentiel usager, souhaiterait adopter.
Figure 1. Concepts choisis enquête 1
10Dans un deuxième temps, nous nous sommes focalisés sur une enquête qualitative et quantitative dédiée au robot Aibo. Il est le plus accepté, sympathique, serviable, contrôlable, fonctionnel parmi les huit concepts évalués précédemment. Cette deuxième enquête a été effectuée au Centre des Sciences de Montréal selon la méthode du Kansei Engineering (Nagamashi, 1971) auprès d’un panel majoritairement montréalais. L’enquête a cessé à saturation des réponses, c’est-à-dire lorsque les réponses n’apportaient plus d’information supplémentaire, elle présente donc une seule situation. Nous avons travaillé avec trente-trois répondants montréalais. L’expérimentation est filmée, les vidéos offrent un repérage complémentaire qui permettent d’appuyer les résultats qualitatifs et quantitatifs (Fig. 2).
11L’objectif est de mesure le degré d’acceptabilité du robot selon la modularité de ses états. L’expérimentation demande au panel de qualifier le robot en trois phases et à chaque étape, elle se déroule de manière systématique toujours dans le même ordre. Dans un 1er temps, les répondants observent Aibo inerte. Les répondants sont installés devant une table, le robot est posé au sol. Durant la 2ème partie, l’animateur et maître d’Aibo au Centre des Sciences, présente le robot, ses fonctionnalités et ses danses. Le robot chien réagit par mécanisme de feed back à la voix et aux gestes de son maître. Aibo module son état affectif, danse, jappe, demande à jouer. La présentation dure 10 minutes. La 3e phase permet au panel d’interagir avec Aibo. Les répondants se placent devant la table et s’accroupissent à hauteur du robot pour interagir, jouer, expérimenter selon leur gré pendant 15 minutes. Entre la 1ère et la dernière expérimentation, le panel évalue ses impressions sur un différentiel sémantique (Osgood, Suci, Tannenbaum, 1957) sur une échelle de 7 valeurs et selon une valeur oppositionnelle. Afin de notifier les changements de perception de l’objet « éteint » à l’objet « allumé », leur libre impression est évaluée sur la 1re et la dernière phase. En phase 1, à la question « Quelles tâches confieriez-vous à Aibo ? » 50 % répondent des activités de divertissement et un tiers des tâches ménagères. En phase 3, les réponses stéréotypées autour des tâches domestiques ont disparu au profit de la surveillance. Lors de la 3e phase, 95 % du panel affirme qu’Aibo est divertissant.
12Les résultats de l’enquête entre la phase 1 et 3 font apparaître deux points révélateurs :
-
le divertissement généré par l’interaction (phase 3) augmente les capacités d’acceptation du robot. Le divertissement est une valeur exponentielle, il déclenche des sentiments d’appropriation et d’affect ;
-
le sentiment de présence est ressenti comme une bienveillance. Cet élément favorise l’acceptation du robot.
13L’analyse des données révèle deux qualités indispensables au robot : Aibo doit capter l’attention et surprendre l’usager. Ces éléments accroissent le potentiel divertissant. Le caractère désobéissant d’Aibo entretient un défi pour le panel et captive son intérêt. Il semble que ce soit dans la désobéissance que le robot interpelle l’usager, il capte son attention et le stimule. L’émulation créée par le groupe joue sur cette donnée : si une partie du panel a obtenu les faveurs d’exécution du robot, l’autre partie se sent mise au défi et tente de se faire obéir, des équipes se forment des équipes de manière spontanée tout en s’amusant.
14Maintenir l’attention par le divertissement ou la curiosité est donc un facteur d’attraction. Certaines personnes vont même jusqu’à évoquer une fragilité ressentie pour Aibo : « il faut faire attention à lui », « il est petit donc il semble avoir besoin de protection ». Une autre personne va jusqu’à se plaindre que le robot ne vienne pas la voir alors que ne cesse de l’appeler d’une petite voix comme elle appellerait gentiment un chien pour essayer de l’attendrir, elle nous dit : « il ne m’aime pas »1. Les résultats prouvent que l’usager réclame un besoin de responsabilité face au robot, mais également la nécessité de travailler sur les formes d’interaction et de présence du robot.
Figure 2 et 3. Phase 3, expérimentation menée au Centre des Sciences de Montréal, mai 2006

15Lors de cette enquête de perception centrée sur Aibo, le panel exprime clairement son rejet dans le fait de découvrir un chien artificiel lors de l’évaluation du robot inerte en phase 1. Pourtant durant les interactions directes avec Aibo (phase 3), le panel a besoin que le robot soit « encore plus chien » en lui intégrant des poils ou la faculté de japper davantage. Le temps de l’interaction écoulé, le robot s’éteint et ce mode électronique du « marche-arrêt » ne permet pas de nouer un lien de dépendance vital.
Scénarii d’usage : potentialités sociales
16Dans l’approche constructiviste et relationnelle des travaux de James et Turing proposée par Dominique Lestel (2016), le statut des robots dépend des choix existentiels que nous faisons vis à vis des machines et du type de dispositif que cela concerne. Comment nous positionnons-nous, repositionnons nos existences lorsque nous sommes en présence des robots ? Quels sont les degrés de compatibilité et les points de jonction entre les fictions engagées par la représentation et la réalité de notre compatibilité ? « L’enjeu des robots sociaux, en d’autres termes, est de créer des communautés hybrides de partage de sens, d’intérêts et d’affects avec des agents dont le statut même de vivant fait partie de ce qui doit être négocié au sein de la communauté, sachant que ce n’est jamais la seule chose qui y est négociée. Avec les robots, c’est la question de l’existence plus que celle de la vie sensu stricto qui est en jeu. Une façon de se rendre compatible est de s’enmachiner. Une façon plus féconde et plus riche de le faire est de mobiliser des fictions engageantes qui nous conduisent à reconceptualiser la porosité de l’espace du vivant et à comprendre le défi posé par les robots comme l’opportunité de repenser la place de l’animisme dans des cultures techno-saturées. Il y en a sans doute d’autres. Dans une approche constructiviste du monde, être vivant n’est pas une propriété mais un dispositif relationnel et performatif qui met en jeu des compétences ou des capacités, sans s’y réduire pour autant ni en avoir la moindre exclusivité. » (Lestel, 2016)
17Nous travaillerons dans cette partie sur les robots en EHPAD et il convient de noter qu’à l’heure actuelle, le manque d’études scientifiques en occident sur le sujet est important2. En 2009 l’état de l’art des recherches en la matière relevait le défaut d’étude scientifique3. Dans une revue de la littérature de 2012, la plupart des études ont démontré des effets positifs de robots de type compagnon (socio) psychologiques (par exemple sur l’humeur, la solitude, les relations sociales et la communication) et les paramètres physiologiques (par exemple, la réduction du stress)4.
18Le projet ROBADOM5 mené par l’INRIA6 a permis de mener une étude sur les besoins exprimés par les personnes âgées concernant un robot assistant durant un entretien semi directif mené par un psychologue. Les répondants démontrent qu’ils n’ont ni l’envie, ni le besoin d’un robot mais qu’ils pourraient servir à des personnes plus fragiles, seules ou dépendantes7. La recherche d’objet, la préhension, le rappel d’évènements (prise de médicaments et calendrier de rappel) sont des fonctionnalités aisément envisagées par les personnes âgées.
19Concernant l’apparence potentielle du robot, les répondants après avoir observé et évalué une série de robots présentée par l’équipe de l’INRIA8, les personnes âgées se montrent défavorables aux robots humanoïdes, les robots les mieux perçus demeurent des objets de petites tailles avec une forme stylisée, discrète et familière semblable à Nabaztag.
20Les résultats de la recherche menés par les équipes de ROBADOM démontrent bien que la population n’est pas encore prête à accepter un robot, les personnes ont eu des difficultés à identifier comment les robots pouvaient répondre à leur besoin cognitif. Rapidement les personnes craignent de manquer de visite et de n’être entourées que de machines. Par ailleurs, les chercheurs ont tenté de vérifier la nature de l’implication physique imposée par un robot (objet tridimensionnel incarné) en proposant un ordinateur portable, un robot et un agent virtuel aux répondants. Les personnes interrogées soulèvent la question de la valeur ajoutée du robot par rapport à un ordinateur mais aucune différence significative concernant l’engagement et le plaisir entre les trois objets.
21Parallèlement le travail produit par la société Aldebaran a démontré que les petits enfants manifestaient plus d’entrain à rendre visite à leurs grand parents précisément parce qu’ils pouvaient jouer avec le robot. Nao est installé à Issy les Moulineaux pour encourager et stimuler les résidents : il discute avec les personnes et leur propose de faire des mouvements avec lui. Le robot est pour le moment contrôlé par un ordinateur afin de répondre de manière adéquate aux questions des résidents. Cette technique appelée Magicien d’Oz permet de mettre en place des protocoles d’expérimentation utilisateur avant de le concevoir. L’usager demeure dans l’illusion d’une interaction directe avec le robot puisque l’opérateur humain est généralement caché ou bien le procédé n’est tout simplement pas explicité au panel. « L’opacité qui néanmoins caractérise la perception du fonctionnement des machines induit nombre d’incertitudes concernant les actions dont elles sont réellement capables. Il est ainsi très simple de créer l’illusion de ces capacités en omettant d’en préciser les limites (Kaplan 2005 : 171-173), très simple de taire ce qui peut alors constituer la technologie d’une croyance » (Becker, 2012). Pour la directrice de l’EHPAD à Issy les Moulineaux, Nao ne remplace pas le personnel soignant, il est utilisé comme un outil au même titre que l’art thérapie pour stimuler les personnes. Le logiciel Zora est un soft adapté pour Nao en situation d’EHPAD : l’objectif selon Fabrice Goffin est de lui confier les tâches chronophages comme lire le journal aux résidents, annoncer la météo et le menu du déjeuner. Le robot libèrerait selon lui le personnel qui pourrait alors se concentrer sur sa mission première, les soins et l’écoute des personnes.
22Depuis 2008, le phoque Paro a envahi les maisons de retraite au Danemark avec plus de 280 robots dans tout le pays. Le robot phoque à visée thérapeutique réagit aux caresses. Selon la thérapeute A. Christoffersen, Paro peut donner aux résidents le sentiment de jouer un rôle, d’avoir une certaine importance. « Je me souviens d’une patiente dont le visage s’illuminait en sa présence, alors qu’avant l’introduction de Paro, elle se tenait immobile et impassible9 ». La maison de retraite Pilehuset spécialisée pour les personnes atteintes de démence comme Alzheimer accueille Paro parmi d’autres outils et dispositifs comme les poupées ou la musique. La directrice du centre explique qu’à un stade avancé de démence, il est difficile d’interagir avec un chien ou un chat : le cerveau et les mouvements des patients sont très lents, de sorte que les animaux s’en vont et ce n’est pas le cas avec Paro.
23Pour E. Grimaud « on célèbre une machine pour sa ressemblance avec un être vivant, mais on en fait usage pour sa dissemblance par rapport à cet être » (2015 : 52). On a pourtant pu constater l’effet d’émulation créé au sein des participants à l’expérimentation. L’effet d’oscillation entre la machine en mode « marche/arrêt » et les temps où l’attachement se crée poussent l’anthropologue à clairement affirmer les notions « d’attachements intermittents » de ces objets qu’il convient pour lui d’envisager comme des « objets à comportement ». « On envisage de façon souvent un peu trop rigide les relations aux robots (on parle « identification », « ontologie ») là où il faudrait les voir de manière dynamique, « en devenir » avec des phases d’approche, de familiarisation, de connexion et de coupure » (2015 :53). Cette acceptation qui permet de considérer la flexibilité et réversibilité de l’objet ouvre des possibilités créatives extrêmement pertinentes d’un point de vue du design. Par ailleurs objets connectés et robots pourraient bien former un écosystème qui prend tout son sens. Ces hyper objets entrainent de nouveaux comportements sociétaux mais aussi de nouvelles manières de vivre et de nouvelles interactions sociales.
24Dès lors, ces machines ne sont plus figées dans une représentation stéréotypée et fantasmée, Grimaud nous confie d’« arrêter d’exiger qu’elles nous ressemblent », elles deviennent des objets évolutifs libérés et s’éloignent d’une dualité humain vs non humain (2012). Intégrés dans nos foyers, le mode existentiel des robots et des objets connectés n’est alors plus relatif à un rôle attribué par la science-fiction, leur modalisation dans le quotidien est à construire : quelles possibilités entrevoir pour ces nouvelles entités ? Selon Armand Hatchuel (2006) le designer intervient judicieusement sur le passage de l’objet connu à l’objet inconnu, c’est qu’il nomme la « logique de pointe ». En effet, au-delà de l’esthétique du robot, il s’agit bien de créer de nouvelles identités, cela suggère par là même d’autres façons de penser et d’interagir.
25Dans le registre de l’anticipation, il convient d’explorer des scénarii fictionnels et la construction d’univers qui permettent de basculer vers des oscillations expérientielles multiples (Cardoso, 2009). Toutes les applications et contextes d’usage sont à construire et à créer.
26Les robots compagnons étudiés sous l’angle du design consistent à poser des points essentiels pour concevoir les possibles scénarii d’usage :
-
La création de contextes spatiotemporels
-
contextualisation des espaces et des usages
-
La création d’une narration : que raconte-ils ? Que nous font-ils vivre ? Comment ?
-
Quels services sont à créer ? Quelles sont les expériences à vivre ?
-
La création d’une communication nécessaire, une médiation pédagogique de ces formes évolutives du robot à renommer « objet à comportement » ou « jouets expérientiels »
-
Ainsi notre corpus de robots pourraient s’envisager comme :
-
des objets médiateurs destinés à prendre soin, à la bienveillance
-
des objets qui valorisent des moments, des expériences et des services rendus
-
des objets qui contribuent à satisfaire et à améliorer les conditions de vie de l’humain
-
des objets à comportement (Grimaud, 2015)
-
une typologie d’objet amicale (Cardoso, 2009 ; 2013)
-
des jouets expérientiels (Cardoso, 2009 ; 2013)
27Les robots de compagnie posent alors les bases d’une typologie plus vaste d’objets destinés aux adultes favorisant une interaction plaisante et une expérience fictionnelle que nous nommerons : jouets expérientiels. Cela signifie que notre objet d’étude situe dans une expérience bénéfique : le rapport au robot devient expérientiel (Shredoff, 2002 ; Brown, 2009). Dans un rapport d’amicalité dédié aux objets, non pas dans un transfert de sentiment humain mais une relation qui considère des états flexibles et évolutifs spécifiques des objets à comportements. Il apparaît alors un univers poïétique et atypique dans lequel les objets ne sont plus objets de surconsommation mais de conversation, dans diverses fiction qui les font parler.
28Le terme « jouet » est sans doute intermédiaire et nécessaire dans l’acceptation progressive des robots, par ailleurs il inclut un public adulte destiné à se familiariser avec ces objets dans un souci de dé-complexification. Ce sont des objets qui favorisent le divertissement, l’expérience bénéfique et multidimensionnelle, ils proposent et génèrent des expériences variées. Les scénarii prennent sens dans ce foisonnement d’états (flexibilité/réversibilité des robots) et d’objets expérientiels. En mettant en adéquation les résultats des enquêtes menées à ces expérimentations, la relation amicale avec l’objet se révèle être le point de compatibilité (Ryan, 1991) qui réunit les univers fictionnels et réels. L’expérience visuelle, émotionnelle, interactive est privilégiée, elle fait partie du projet design. Les univers réels/virtuels/fictionnels s’imbriquent les uns dans les autres. Ce chevauchement favorise la création d’espaces transitionnels : un environnement intermédiaire où l’usager, le regardeur ou le spectateur trouve sa place dans le scénario à créer. Un aller-retour entre réalité et fiction s’avère nécessaire à la construction de l’identité des robots en Occident.
Bibliographie
Becker, J., Le corps humain et ses doubles. Sur les usages de la fiction dans les arts et la robotique, in Gradhiva n° 15 « Etrangement humains », 2015.
Bemelmans, R., Gelderblom, G., Jonker, P., Witte, L., Socially Assistive Robots in Elderly Care : A Systematic Review into Effects and Effectiveness, Journal of America Medical Directors Association, 2012, 13(2) : 114-120
Broekens, M. Heerink, H. Rosendal, Assistive social robot in ederly care : a review in Gerontechnology 2009 ; 8(2) : 94-103
Brown, T. (2009), L’esprit design. Le design thinking change l’entreprise et la stratégie, Pearson, Paris, 2010.
Dunne, A. & Raby, F., Speculative everything. Design, fiction and social dream, MIT Press, 2013
Grimaud, E., Les robots oscillent entre vivant et inerte, in Multitudes n° 58, majeure « Nouvelle robotique, nouveaux vivants », avril 2015.
Grimaud, E., Androïde cherche humain pour contact électrique. Les cinétiques de l’attachement en robotique, in Gradhiva n° 15 « Etrangement humains », 2015.
Hatchuel, A., Quelle analytique dans la conception : parure et pointe en Design, in « Le design. Essai sur des théories et des pratiques », dirigé par Brigitte Flamand, Institut français de la mode, 2006.
Lestel, D., Laisser vivre les machines, in actes de colloque « Des êtes vivants et des artefacts. L’imbrication des processus vitaux et des processus techniques », Musée du Quai Branly, Paris 2016. http://actesbranly.revues.org/647
Ryan, M-L., Possible Worlds, Artificial Intelligence and Narrative Theory, Indiana University Press, Bloomnington, 1991.
Shredoff, N., Experience Design 1.1, New Riders Publishing, Indianapolis, 2001.
Suchman, L., Plans and situated actions : the problem of human-machine communication, 1987 ; Human Machine Reconfigurations, 2007
Tamura, T., Yonemitsu, S., Itoh, A., Oikawa, D., Kawakami, A., Higashi, Y., Fujimoto, T. and Nakajima, K., Is an Entertainment Robot Useful in the Care of Elderly People With Severe Dementia ?, Journal of Gerontology A Biol Sci Med Sci (2004) 59 (1) : 83-85
Vidal, D., Vers un nouveau pacte anthropologique. Les enjeux anthropologiques de la nouvelle robotique, in Gradhiva n° 15 « Etrangement humains » , 2015.
Wu Y.-H., Fassert, C., Rigaud, A.-S., Designing robots for the elderly : Appearance issue and beyond, Original Research Archives of Gerontology and Geriatrics, Volume 54, Issue 1, January–February 2012 : 121-126.
Notes
1 Nous pouvons ici faire référence au projet de Rodney Brooke, Heart Robot : « Pouvons-nous aimer un robot ? Un robot peut-il nous aimer en retour ? Le robot a l’air à une créature fragile, malade, étrange, qui contraste avec l’image menaçante caractérisant les humanoïdes » (Becker, 2012).
2 Alors qu’au Japon, les études débutent en 2003 sur Aibo : Toshiyo Tamura, Satomi Yonemitsu, Akiko Itoh, Daisuke Oikawa, Akiko Kawakami, Yuji Higashi, Toshiro Fujimooto and Kazuki Nakajima, Is an Entertainment Robot Useful in the Care of Elderly People With Severe Dementia ?, Journal of Gerontology A Biol Sci Med Sci (2004) 59(1) : 83-M85.
3 Broekens, M. Heerink, H. Rosendal, Assistive social robot in ederly care : a review in Gerontechnology 2009 ; 8(2) : 94-103.
4 Roger Bemelmans , Gert Jan Gelderblom, Pieter Jonker, Luc de Witte, Socially Assistive Robots in Elderly Care : A Systematic Review into Effects and Effectiveness, Journal of America Medical Directors Association, 2012, 13(2) :114-120.
5 Concevoir un robot doté de la faculté de réagir émotionnellement et de parler dans l’objectif de venir en aide aux personnes atteintes de troubles cognitifs légers.
6 Ya-Huei Wu, Christine Fassert, Anne-Sophie Rigaud, Designing robots for the elderly : Appearance issue and beyond Original Research Archives of Gerontology and Geriatrics, Volume 54, Issue 1, January–February 2012, pp. 121-126.
7 Ces résultats rejoignent les enquêtes de perception menées en 2006 au Centre des Sciences de Montréal sur Aibo, le panel évoque la bienveillance du robot pour des personnes faibles ou fragiles, jamais pour elles (Cardoso, 2009 ; Cardoso, 2013).
8 Présentation de photographies de 26 robots différents (R2D2, robuLAB 10, Aibo, Amiet, Anybot Monty, Asimo, Nexi-MDS, Care-o-bot®3, Care-o-bot®II, Eve from WALL-E of Pixar, HRP4C, iRobiQ, Robot Housekeeper, Kobian, Mamoru, Mechadroid type c3, uBOT-5, Motoman SDA10, Nao, Paro, Pomi, My Spoon, Ri-Man, SmartPal, Toyota i-foot, Twendy-One), puis de videoclips des robots en action.
9 http://www.phoque-paro.fr/wp-content/uploads/2014/06/La_Croix_1159434.pdf
Pour citer ce document
Quelques mots à propos de : Stéphanie Cardoso
Université Bordeaux Montaigne. Courriel : stephanie.cardoso@u-bordeaux-montaigne.fr